工业机器人用PLC控制还是自己有一套控制?
答:工业机器人有自己的一套控制与驱动系统贝加莱工业自动化。单一的PLC控制无法完成工业机器人的复杂的运动和工作流程。因为机器人的机械驱动装置过于精密和繁琐。
■工业机器人的控制系统涉及到位置及姿态、路径轨迹及规划、动作时间间隔以及末端执行器施加在被作用物上的力和转矩等等进行控制贝加莱工业自动化。这些动作包括多变量控制系统;与机构运动学及动力学;耦合非线性控制系统;计算机控制系统;寻优控制系统等。
■工业机器人控制系统要求对位置、速度、加速度、连续轨迹进行控制;还要方便人→机交换,便于操作人员直接命令进行相关动作的修改;并且要求对外部环境具有检测能量,诸如视觉、力觉、触觉信息进行测量、识别、判断、理解等贝加莱工业自动化。
■一般来说,工业机器人控制系统基本结构的构成包括有,基于PLC的运动控制贝加莱工业自动化。见下图1.1所示。
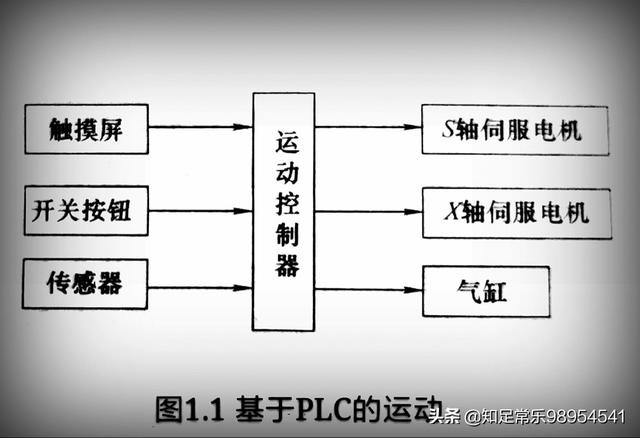
●利用PLC的某些输出端口,使用脉冲输出指令来产生脉冲驱动电动机,同时使用通用I/O或计数器来实现被控电动机的闭环位置控制贝加莱工业自动化。
■基于PC和运动控制卡的运动控制,见下图1.2所示贝加莱工业自动化。

●利用PC和运动控制卡运动控制为主,此时工控PC只提供插补运算和运动指令贝加莱工业自动化。通过高速的工业总线进行PC与驱动的快速通信,能够提高机器人的生产效率和灵活性。从某种意义上来讲,这种语言的制作难度和时间的成本很大。
■随着芯片集成技术和计算机总线技术的发展,借助于PC强大功能来实现机器人的控制,降低成本,人们制作专用的纯PC处理器来直接控制工业机器人,见下图1.3所示贝加莱工业自动化。
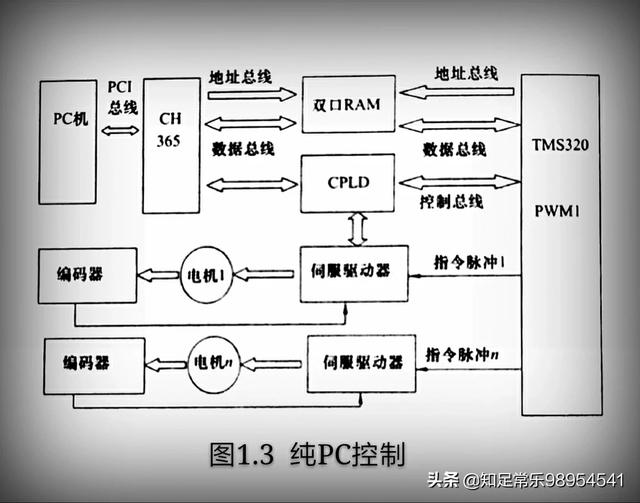
■它综合了PC控制卡的功能,将运动芯片与开发指令软件融为一体,使机器人的控制变得简单、方便易实现贝加莱工业自动化。
■集中控制系统,包括在此基础上的主从控制系统贝加莱工业自动化。见下图1.4所示。

■集中控制系统( centralized control system)→用一台计算机实现全部控制功能,结构简单,成本低,但实时性差,难以扩展,在早期的机器人中常采用这种结构贝加莱工业自动化。
●它是基于PC的集中控制系统,充分利用了PC资源开放性的特点,可以实现很好的开放性贝加莱工业自动化。多种控制卡、传感器设备等都可以通过标准PCI插槽或通过标准串口、并口集成到控制系统中,集中式控制系统的优点是:硬件成本较低,便于信息的采集和分析,易于实现系统的最优控制,整体性与协调性较好,基于PC的系统硬件扩展较为方便
其缺点也显而易见贝加莱工业自动化。系统控制缺乏灵活性,控制危险容易集中,一旦出现故障,其影响面广,后果严重。由于工业机器人的实时性要求很高,当系统进行大量数据计算,会降低系统实时性,系统对多任务的响应能力也会与系统的实时性相冲突。此外,系统连线复杂,会降低系统的可靠性
●主从控制系统→采用主、从两级处理器可实现系统的全部控制功能贝加莱工业自动化。主CPU实现管理、坐标变换、轨迹生成和系统自诊断等;从CPU实现所有关节的动作控制。主从控制方式系统通用性较好,适用于高精度、高速度控制………待续。
以上为个人观点,仅供大家参考贝加莱工业自动化。
知足常乐2019.9.1日于上海

免责声明
本文仅代表作者观点,不代表本站立场,著作权归作者所有;作者投稿可能会经本站编辑修改或补充;本网站为服务于中国中小企业的公益性网站,部分文章来源于网络,百业信息网发布此文仅为传递信息,不代表百业信息网赞同其观点,不对内容真实性负责,仅供用户参考之用,不构成任何投资、使用建议。请读者自行核实真实性,以及可能存在的风险,任何后果均由读者自行承担。如广大用户朋友,发现稿件存在不实报道,欢迎读者反馈、纠正、举报问题;如有侵权,请反馈联系删除。(反馈入口)
本文链接:https://www.byxxw.com/zixun/20485.html- 上一篇: 为什么感觉中国制造业放慢了自动化的普及?
- 下一篇: 河南原先的三本院校有哪些?